

Роботизированный пункт выдачи заказов
В МФТИ создали российского автоматического ассистента для общения с клиентами
Специалисты Исследовательского центра прикладных систем ИИ МФТИ успешно завершили опытную эксплуатацию собственной модульной платформы для создания индустриальных решений. На базе платформы был разработан и протестирован антропоморфный робот-кладовщик для e-commerce. Испытания прошли на действующем складе одного из российских продуктовых ритейлеров.

Робот Квант со своими создателями, сотрудниками Исследовательского центра прикладных систем ИИ МФТИ
Фото: Пресс-служба МФТИ
Робот Квант со своими создателями, сотрудниками Исследовательского центра прикладных систем ИИ МФТИ
Фото: Пресс-служба МФТИ
Антропоморфный робот, созданный на базе модульной платформы ИЦ прикладных систем ИИ МФТИ, функционирует как сотрудник пункта выдачи заказов, оформляющий и выдающий посылки онлайн-маркетов. Он взаимодействует и общается с посетителем, сканирует штрихкоды заказа и приносит его со склада.
Базой для робота стала созданная в МФТИ универсальная модульная платформа, позволяющая в короткие сроки вести разработку разговорных ассистентов, робототехнических систем и беспилотного автотранспорта с текстовыми, голосовыми, фото- и видеосервисами. Это программное обеспечение позволит на базе уже имеющихся решений создавать совершенно новые продукты под конкретного заказчика.
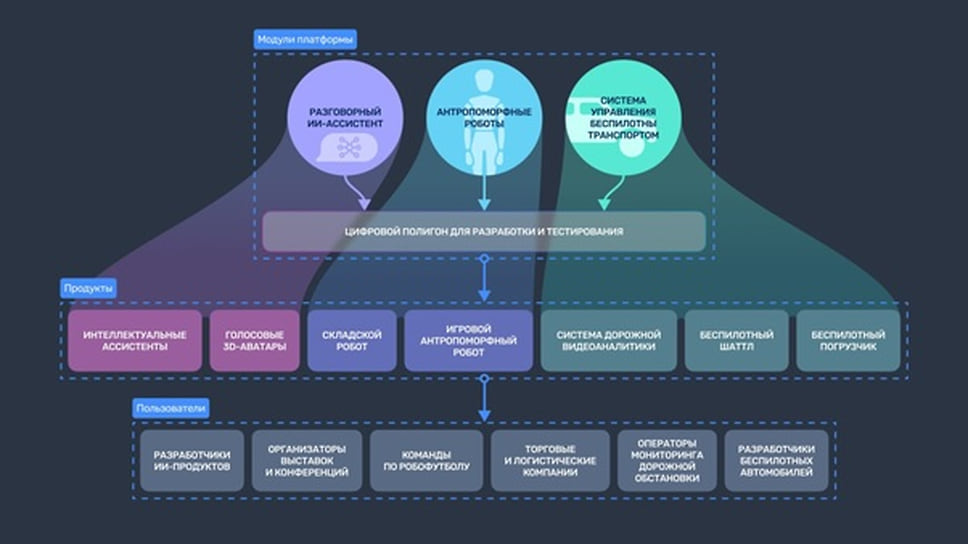
Модульность платформы позволяет сократить время разработки, а тестирование и доработка на цифровом полигоне ускоряет время ввода новых решений для индустрии в эксплуатацию. Платформа содержит готовые к применению модули и компоненты для следующих продуктов: разговорный ИИ для персональных ассистентов, разговорный голосовой ассистент, антропоморфный робототехнический комплекс, система управления беспилотным транспортом. Используя эти готовые модули и комбинируя их компоненты, можно быстро создавать отраслевые решения по заказам индустриальных компаний.
Примеры продуктов, собранных на основе платформы: разговорный ассистент для управления робототехническими комплексами и беспилотным транспортом, антропоморфный робот-кладовщик, оснащенный голосовым ассистентом, сервис создания ИИ-ассистентов, система управления с голосовым ассистентом для беспилотного погрузчика, голосовой 3D-ассистент выставочного стенда, система дорожной видеоаналитики, игровой антропоморфный робот.
По мнению разработчиков, направлениями применения модульной платформы могут стать сетевые торговые предприятия, складские и логистические комплексы, университеты и различные организации: владельцы команд по робофутболу, операторы мониторинга дорожной обстановки, участники выставок и конференций, а также разработчики чат-ботов и разговорных ассистентов.
Роман Горбачев, директор Исследовательского центра прикладных систем искусственного интеллекта МФТИ, заведующий лабораторией волновых процессов и систем управления МФТИ, ответил на вопросы «Ъ-Науки»:
— Сейчас существует несколько роботов-помощников, таких как, например, робот Мокси от компании Diligent Robotics или российский Промобот. Чем робот Квант отличается от этих аналогов?
— Перечисленные роботы не являются антропоморфными в полном смысле, поскольку у них нет ног и они не могут передвигаться как человек, что особенно важно для перемещения по сложному рельефу, лестницам. Один из примеров сложного рельефа местности — строительная площадка или промышленные производства, где внедрение антропоморфных роботов-помощников является перспективным.
— Расскажите подробнее про универсальную модульную платформу, созданную МФТИ.
— Разработанная в МФТИ платформа является аппаратно-программным комплексом, состоящим из нескольких независимых модулей: для обработки речи, для планирования и управления движениями шагающего робота и движением беспилотного транспорта. Модульность означает, что каждый блок (например, распознавание голоса, система навигации или цифровой полигон для тестирования) может быть разработан, доработан и интегрирован в общую систему отдельно. Такой подход избран потому, что задач у будущих пользователей очень много: одним нужны голосовые роботы в выставочных залах, другим — управление беспилотными погрузчиками на складе. Благодаря модульности проекты можно «собирать» быстрее и дешевле, практически как из отдельных «кубиков». Наша платформа позволяет на базе уже имеющихся решений создавать совершенно новые продукты под конкретного заказчика. Модульность позволяет сократить время разработки и адаптации, а апробирование и доработка на цифровом полигоне, позволяет сократить время ввода новых решений в постоянную эксплуатацию.
Используя данные готовые модули и комбинируя их компоненты, возможно быстрое создание отраслевых программных и аппаратно-программных решений по заказам индустриальных партнеров и других клиентов. В качестве примера использования разработанной платформы можно рассмотреть вариант, когда условный складской комплекс заказывает разработку разговорного ассистента для управления робототехническими комплексами и беспилотным транспортом. Для реализации такого проекта выбираются необходимые модули, а также компоненты этих модулей и на их базе создается продукт, необходимый заказчику. Далее готовый продукт адаптируется под требования заказчика и на цифровом тестовом полигоне отлаживается конечное программное обеспечение. Такой подход позволит минимизировать издержки заказчика в получении готового и законченного решения, а также эффективнее планировать ресурсы исполнителя.
— Как проходили испытания робота?
— Испытания проходили в два основных этапа. Сначала — в виртуальной среде (на «цифровом полигоне»), где проверялись алгоритмы управления и технические модули без рисков для реальных объектов. Затем робот тестировался в условиях реального склада: там проверялась способность понимать голосовые команды человека, вести диалог на естественном языке и принимать решения на основе анализа окружающего пространства и расположенных в нем предметов. Такой подход позволил оперативно выявить и исправить возможные ошибки на разработанной платформе.
Модули и компоненты платформы, задействованные для создания разговорного ассистента. Модули, которые необходимы для создания, выделены определенными цветами, модули и компоненты, которые не применяются при создании, обесцвечены
Фото: Пресс-служба МФТИ
Модули и компоненты платформы, задействованные для создания разговорного ассистента. Модули, которые необходимы для создания, выделены определенными цветами, модули и компоненты, которые не применяются при создании, обесцвечены
Фото: Пресс-служба МФТИ
— Насколько реально использование таких роботов в сфере услуг? Можно ли поставить на поток или это все же будут единичные экземпляры?
— Использовать антропоморфных роботов в сфере услуг в экспериментальных сценариях вполне реально уже сейчас, поскольку базовые технологии — распознавание речи, навигация в пространстве, обработка изображений и управление движениями робота — уже реализованы в составе нашей платформы. Более того, модульная архитектура позволяет адаптировать робота под конкретные задачи: от консультирования посетителей в торговых центрах до обслуживания в гостиницах и на выставках. За один-два месяца с помощью нашей платформы мы сможем обучить робота и отладить его на новых сценариях работы, ранее для этого требовались годы.
Однако вопрос массового производства (поставить на поток) во многом зависит от стоимости отдельных компонентов, тиражируемости решений и уровня спроса на рынке. Пока такие роботы чаще всего создаются под конкретные проекты и задачи, но уже сейчас есть предпосылки к серийному выпуску. Снижение себестоимости производства и развитие инфраструктуры позволит постепенно выводить роботов на массовый рынок.
— Какими, на ваш взгляд, станут роботы будущего? Как будут развиваться технологии создания антропоморфных роботов в дальнейшем?
— Шаг за шагом мы приближаемся к созданию того самого универсального робота — помощника человеку. А поскольку вся окружающая нас инфраструктура создана для людей, то, чтобы заменить человека в какой-либо работе или выполнять задачи совместно, робот должен уметь манипулировать объектами как человек, ходить и преодолевать препятствия. С точки зрения энергоэффективности и проходимости человек — единственное живое существо, которое на одном приеме пищи может пройти наибольшее расстояние, а передвижение на двух ногах обладает наибольшей проходимостью по разному рельефу местности: по твердой земле, пескам, камням, болотам.
На самом деле научно-технических проблем и задач огромное количество. Здесь выделим следующие направления разработки: это исследования и разработка тела робота, его механики, конструктивных элементов, морфологии и отдельно программного обеспечения для робота. На самом деле наибольшее количество трудозатрат уходит именно на разработку математических методов и алгоритмов, методов искусственного интеллекта и их программирование.
Основоположник ИИ Марвин Минский (из лаборатории искусственного интеллекта MIT) отмечает, что сложнее всего произвести обратную разработку тех навыков, которые являются бессознательными у человека.
Современные исследователи выделяют два основных типа интеллекта у роботов, которые разрабатываются.
Атлетический интеллект — это способность робота выполнять динамичные движения, ходьба по разным поверхностям, бег, прыжки, ходьба по лестнице и т. д. Пример простой для нас бытовой ситуации, которую пока не может выполнить антропоморфный робот,— нужно, проходя мимо стола, в движении взять бутылку воды с него, я не говорю уже о том, чтобы в движении схватить стакан с водой и не расплескать ее.
Поведенческий интеллект — это то, как нужно взаимодействовать с внешним миром, с предметами и субъектами, знания о свойствах нашего мира, о контексте. Простейший пример — знания о том, что, чтобы вызвать лифт, нужно нажать на кнопку.
Разработанная в МФТИ модульная платформа закладывает фундамент и будет способствовать ускоренному созданию и развитию роботов будущего. Ее архитектура позволяет разрабатывать и обучать новые робототехнические системы. Благодаря этому процесс интеграции новых функций и адаптации к конкретным задачам (складские операции, обслуживание клиентов, интерактивные выставки) становится быстрее и дешевле, а значит, приближает нас к полноценным роботам общего назначения.
Подготовлено при поддержке МФТИ