

иллюстрации Сергей Гудков
схема Мила Силенина

Александр Аркадьевич Красовский
Основным средством контроля пространственного положения боевой техники (наземной, воздушной, морской, космической) является инерциальная навигационная система (ИНС). Она контролирует координаты, скорость и угловое положение аппаратов относительно вертикали места. Одно из главных достоинств ИНС — это ее автономность. Недостаток — нарастающие со временем ошибки в определении навигационных параметров. Поэтому показания ИНС, как правило, корректируются по данным радионавигационных систем. Но автономность — очень важное для боевой техники качество — при этом теряется.
Поиск путей, позволяющих избавиться от нарастающих со временем ошибок, привел к идее использования информации о естественных физических полях Земли: поверхностных — рельеф земной поверхности, тепловой, оптический и радиолокационный контраст; пространственных — гравитационное и магнитное поля.
Идея не новая. Навигация по магнитному компасу известна давно. Да и в природе птицы, насекомые и животные (наземные и морские) совершают длительные путешествия, руководствуясь генетическими данными о геофизических полях (ГФП). Голубь, увезенный за десятки и сотни километров, может вернуться в свою голубятню даже с закрытыми глазами. Механизм бионавигации пока в стадии изучения. Единственное, что удалось "подсмотреть", — это механизм ориентации на Северный полюс. В итоге появился географический компас. Пока что он не такой компактный, как магнитный, но более точный и надежный (ввиду дрейфа магнитных полюсов). В дальнейшем, по мере развития микромеханических и биотехнологий геокомпас может быть представлен как разновидность интегральных микросхем.
Теоретическое обоснование навигации с использованием данных о естественных ГФП было дано в 1963 году д.т.?н. А.?А. Красовским. Теория и практика таких систем были затем развиты его учениками.
В качестве полезной для навигации информации о параметрах ГФП А.?А. Красовский предложил использовать их аномальные компоненты, связанные с особенностями местности. К таковым, в частности, относятся высота рельефа, границы раздела типов земной поверхности, значения производных гравитационного и магнитного потенциалов. Параметры ГФП представляются в виде суммы нормальной и аномальной компонент. Нормальная компонента описывается детерминированной функцией, аномальная — статистическими законами. Для рельефа нормальной компонентой является референц-эллипсоид (приближенная форма поверхности Земли), для гравитационного и магнитного полей — уравнения Лапласа. Аномальная часть характеризуется параметрами корреляционной функции — дисперсией и радиусом или интервалом корреляции поля. Отсюда произошло и название систем навигации — корреляционно-экстремальные навигационные системы (КЭНС). Слово "экстремальные" связано с методом распознавания измеренных датчиком значений ГФП.
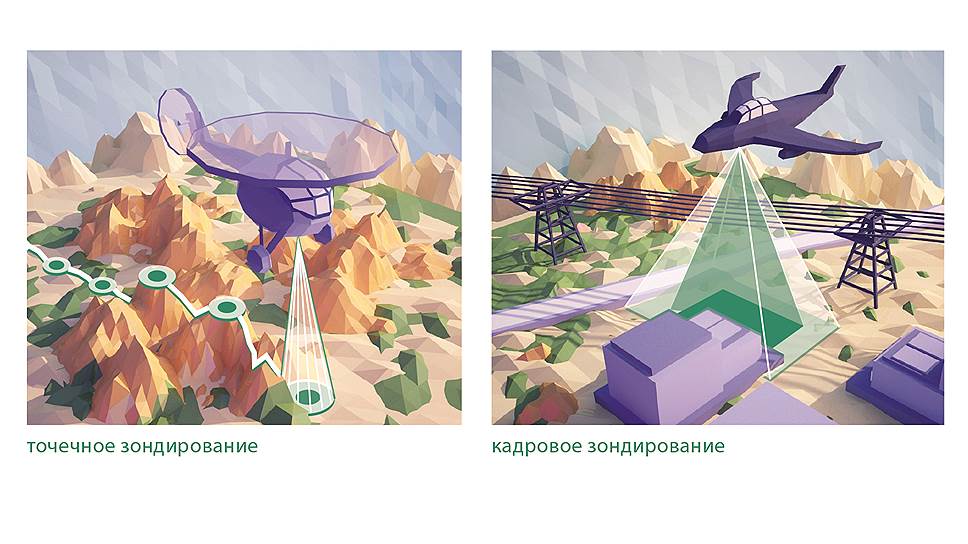
Датчики поверхностных полей могут снимать информацию с точки, линии или кадра в зависимости от условий применения. Датчики пространственных полей регистрируют их параметры только в месте нахождения датчика.
При точечном зондировании поля решение о местоположении принимается после прохождения определенного интервала, величина которого зависит от точности картографирования и бортовых измерений. При кадровом зондировании решение может быть принято практически сразу после завершения наблюдения.
Пространственные поля являются глобальными, и в этом их привлекательность. Степень картографической изученности гравитационного и магнитного полей приближается к 100%, но детальность и информативность аномальных компонент пока что существенно отличаются от района к району. Соответственно, точность навигации колеблется от десятков до сотен метров.
С поверхностными полями проблем с картографированием практически нет. Большое количество картографических спутников разных стран оперативно снимают земную поверхность с разрешением не хуже одного метра в оптическом и радиодиапазонах. Достижимая точность навигации по поверхностным полям составляет первые десятки и единицы метров.
Каким образом осуществляется определение местоположения в КЭНС?
Структура КЭНС в общем виде представлена на рис. , принцип работы поясняется на рис. . В момент измерения параметров поля фиксируются координаты предполагаемого местоположения по данным ИНС и вероятная ошибка в определении координат (?инс). Область вероятного положения формируется в виде круга (или прямоугольника) радиусом не менее 3? и с центром в точке предполагаемого по данным ИНС положения. Эталонные значения поля в области вероятного положения извлекаются из бортовой памяти и сравниваются с измеренным значением определенным образом. Результаты сравнения накапливаются на интервале наблюдения, и координаты точки, в которой разница между измеренными и эталонными значениями будет минимальна, принимаются за истинные.
Освоенными на текущий момент можно считать КЭНС по вертикальным профилям рельефа местности (маршрутная навигация) и наведение по оптическому контрасту в районе цели.
В комплексах радиоэлектронного оборудования пилотируемых и беспилотных боевых летательных аппаратов внедряются режим маловысотного полета с облетом и обходом препятствий, режим предупреждения столкновения с земной поверхностью.
Освоение КЭНС по пространственным геофизическим полям планируется в перспективных разработках боевой техники. Однако в целом внедрение КЭНС явно недостаточно, если учесть их преимущества по сравнению со спутниковыми навигационными системами (СНС).
Корреляционно-экстремальные навигационные системы по пространственным и поверхностным геофизическим полям и эталонам целей являются по существу единственной альтернативой СНС. Обладая в большинстве применений практически равными с СНС потенциальными возможностями в отношении точности, универсальности, способности интеграции с другими системами, невысокой стоимости аппаратуры пользователей, КЭНС превосходят СНС по ряду других принципиально важных показателей.
Структура корреляционно-экстремальной навигационной системы

ИНС--инерционная навигационная система, БЦВМ --бортовая цифровая вычислительная машина, РЗП --рельеф земной поверхности, МПЗ--магнитное поле Земли, ГПЗ--гравитационное поле Земли
Диаграмма: Мила Силенина
Как работает КЭНС
Корреляционно-экстремальная навигация, наведение
Геофизические поля: рельеф, оптическое, магнитное, радиотепловое, радиолокационное, гравитационное
Точность автономной навигации: суша—5–50 м море—<200 м
Автоматический заход на посадку и посадка на малооборудованном аэродроме

Диаграмма: Сергей Гудков
Достоинства: всепогодность, круглосуточность
Маловысотный полет в автоматическом режиме

Диаграмма: Сергей Гудков
Достоинства: всепогодность, круглосуточность
В отличие от СНС, КЭНС:
— ориентируются относительно реальной поверхности Земли, а не виртуального референц-эллипсоида;
— почти не занимают места в эфире, воздушном, наземном, морском и космическом пространствах;
— обеспечивают высокоточную автономную навигацию как в воздушной, так и в морской среде;
— обладают высокой или полной помехоустойчивостью и скрытностью функционирования;
— не нуждаются в затратах на эксплуатацию и восстановление навигационных полей;
— не оказывают негативного влияния на экологическую обстановку;
— способны обеспечить весьма высокие боевую устойчивость и надежность.