

Робот-манипулятор будет знать, что делать
Управляющие программы позволят автоматизировать сложные процессы механической обработки
В лаборатории «Электрофизические технологии» кафедры литья Самарского государственного технического университета начал работать шестипозиционный робот-манипулятор, который может выполнять объемную электродуговую наплавку по сложным траекториям.
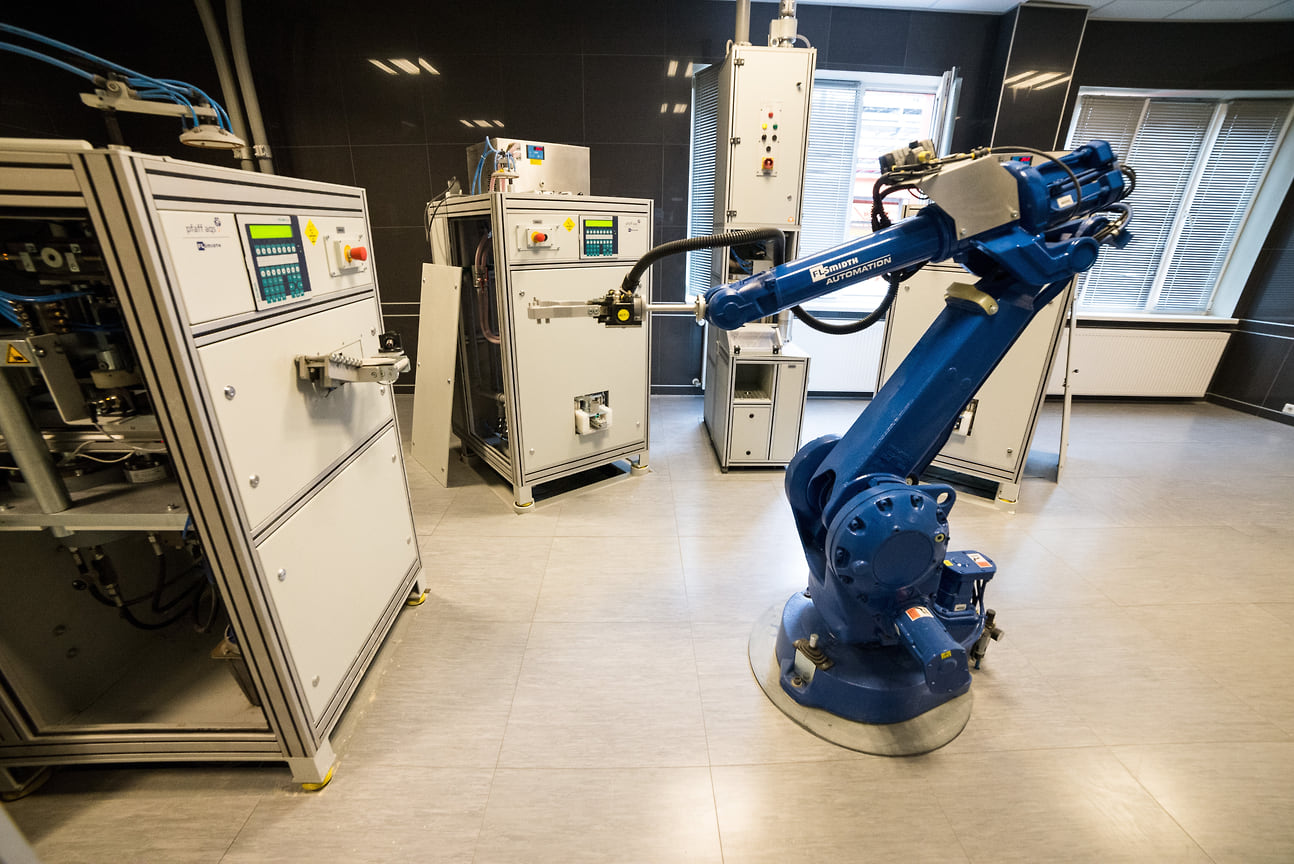
Фото: Олег Харсеев, Коммерсантъ
Фото: Олег Харсеев, Коммерсантъ
Робот-манипулятор — это аналог человеческой руки. Только наша рука имеет до 31 степени свободы (осей) с учетом кистевой части, а этот робот-манипулятор — 6 степеней (осей) свободы, имитируя руку от предплечья до кисти.
Функционал такого робота может быть различным: перемещение объектов в пространстве с высокоточным расположением (подачей) объектов в рабочую зону другого устройства, удаление из рабочей зоны, подача и фиксация при монтаже; выполнение операций по механической обработке заготовок, сварка, наплавка и т. д. Все зависит от того, какой инструмент разместить на окончании роботизированной руки. Захват — перемещение объектов в пространстве; фреза или резец — механообрабатывающий роботизированный станок; сварочная горелка — сварка по сложным траекториям, наплавка и т. д. Под каждый инструмент разрабатывается управляющая программа, чтобы робот знал, что и как ему делать.
Мы реализовали функцию объемной наплавки, по сути, создав возможность 3D-печати объектов из металлов и сплавов способом электродуговой наплавки. Держатель для сварочной горелки изготовили магистранты, использовав технологию реверс-инжиниринга, аддитивные технологии для изготовления литейной оснастки и стандартные процессы литья по выжигаемым моделям.
Параметры наплавки (сила тока, напряжение, скорость подачи проволоки в зону горения дуги, диаметр и материал проволоки) задаются на сварочном полуавтомате. Перемещение сварочной горелки в пространстве — роботом по создаваемой оператором управляющей программе.
Его предоставили в безвозмездное пользование индустриальные партнеры Политеха — ГК «Волгаэнергопром» и ТПП «Велдинг Групп Самара», а специализированное программное обеспечение для разработки управляющих программ — компания «Спрут Кам». Магистранты кафедры спроектировали и изготовили оснастку для крепления сварочной горелки. Материалом для наплавки служит проволока из разных металлов и сплавов.
В перспективе — создание гибридной технологии, сочетающей в себе элементы аддитивных и субтрактивных процессов. Для этого требуется еще один робот-манипулятор, который будет выполнять функцию роботизированного механообрабатывающего станка. А для получения качественной наплавки планируем интегрировать индуктор для магнитно-импульсной обработки наплавляемых слоев. И это будет уже отличительной новизной нашего проекта. Индуктор и установку для магнитно-импульсной обработки будут разрабатывать наши коллеги из Самарского национального исследовательского университета имени академика С. П. Королева (Самарский университет).
Самарский государственный технический университет. Подготовлено при содействии Минобрнауки