

Нейросеть и манипуляции
Разработана адаптивная система управления манипулятором на колесах
Коллектив российских исследователей представил инновационный подход к адаптивному контролю траектории колесного мобильного манипулятора. Они соединили адаптивное управление с использованием нейронных сетей и методы ограничения выходных параметров, что позволило значительно улучшить точность отслеживания траектории и безопасность работы манипуляторов.

Пример колесного мобильного манипулятора
Фото: IEEE Access
Пример колесного мобильного манипулятора
Фото: IEEE Access
В последние годы колесные мобильные манипуляторы привлекают все большее внимание благодаря своей универсальности и способности выполнять сложные задачи в различных областях, таких как спасательные операции, 3D-печать и взаимодействие с людьми. Однако управление ими представляет собой сложную задачу из-за того, что их движение описывается нелинейными уравнениями. Традиционные методы управления часто не учитывают динамические неопределенности и внешние возмущения, что может привести к снижению точности и безопасности.
Метод адаптивного управления позволяет системе автоматически подстраиваться под изменения в окружающей среде или в самой системе. Радиальные базисные функции позволяют эффективно приблизить любые нелинейные функции, что делает их эффективной математической моделью для описания нелинейных процессов. В искусственных нейронных сетях функция активации нейрона определяет выходной сигнал, который определяется входным сигналом или набором входных сигналов. Нейронная сеть с радиальными базисными функциями представляет собой тип нейронной сети, который использует радиальные базисные функции в качестве функций активации нейронов, что позволяет эффективно моделировать сложные динамические системы. Для анализа устойчивости динамических систем в таких задачах используется функция Ляпунова, которая позволяет определить устойчивость траекторий системы.
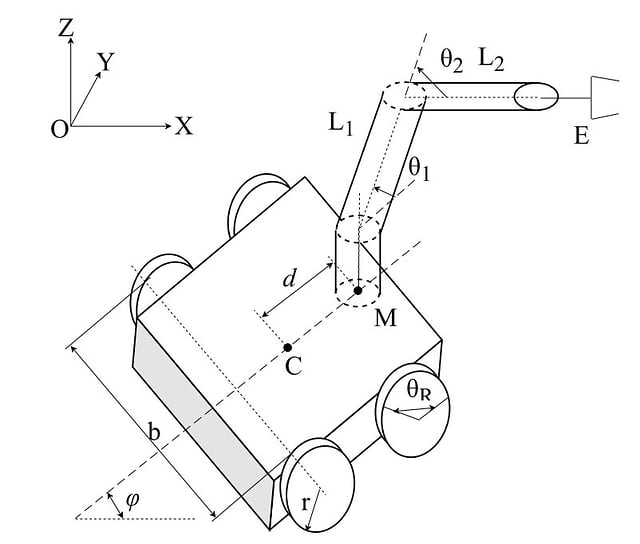
Схема колесного мобильного манипулятора
Фото: IEEE Access
Схема колесного мобильного манипулятора
Фото: IEEE Access
Основной целью недавнего исследования является разработка адаптивного контроллера для колесного мобильного манипулятора, который обеспечивает точное отслеживание заданной траектории, одновременно соблюдая ограничения на выходные параметры. Это достигается за счет использования адаптивного управления нейронной сетью и функции Ляпунова для ограничения ошибок отслеживания.
В исследовании был предложен контроллер, использующий метод обратного шага (backstepping) с временной барьерной функцией Ляпунова для ограничения ошибок отслеживания в пределах заданных границ. Также была проведена оценка стабильности, которая подтвердила устойчивость контроллера. Результаты моделирования в MATLAB показали, что предложенная система значительно превосходит уже существующие методы, такие как адаптивное скользящее управление и немодифицированный контроллер обратного шага.
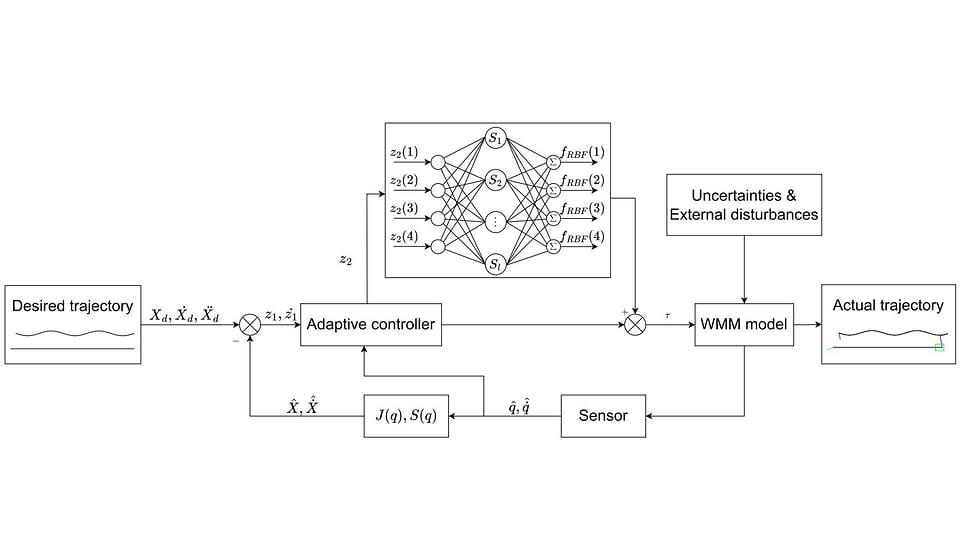
Блок-схема системы управления колесным мобильным манипулятором
Фото: IEEE Access
Блок-схема системы управления колесным мобильным манипулятором
Фото: IEEE Access
Контроллер обратного шага принимает ошибку между опорной траекторией и измеренной траекторией в качестве входных данных. Переменная z2 служит входными данными для нейронной сети. Эта сеть выводит компенсационное слагаемое, которое объединяется с выходными данными контроллера обратного шага для формирования входных данных.
«Наше исследование демонстрирует, что использование адаптивного управления в сочетании с нейронными сетями и ограничениями на выходные параметры может значительно повысить безопасность и точность работы колесных мобильных манипуляторов,— рассказал Чжан Хучжэньюй, аспирант МФТИ.— В будущем мы планируем использовать комплексирование мультимодальных сенсорных данных в сочетании с адаптивным фильтром Калмана для точной оценки переменных состояний. Это повысит надежность контроллера и его применимость в более неопределенных условиях».
Как отметил Дмитрий Юдин, заведующий лабораторией интеллектуального транспорта Центра когнитивного моделирования МФТИ, эта работа — хороший пример успешного исследования, проведенного аспирантом из Китая Чжаном в ходе подготовки его кандидатской диссертации по тематике интеллектуального управления мобильными манипуляторами на основе обработки информации от сенсоров.
Предложенный контроллер может быть применен в различных областях, включая промышленную автоматизацию, системы помощи при спасательных операциях, а также проведение хирургических операций с помощью роботов.
Подготовлено пресс-службой МФТИ
Использованы материалы статьи