

В Нижнем Новгороде создается робот-аватар
биометрика
Нейротехнологии, разрабатываемые сегодня, обеспечивают передачу биометрических сигналов человека для управления внешними устройствами как напрямую — от мозга человека, так и опосредованно — за счет сигналов периферической нервной системы, электромиографической активности, кинематики конечностей, движения глаз и т.д.
Положение тела человека в пространстве, геометрию расположения его конечностей можно рассматривать как информативный биометрический паттерн. Эффективность его использования как элемента нейроинтерфейса можно почувствовать в компьютерных играх с видеосенсорами, где игрок может управлять виртуальными аватарами посредством собственных движений без использования джойстиков. С прямым управлением "силой мысли" ситуация сложнее. Например, самый известный метод прямой регистрации мозговой деятельности — электроэнцефалография (ЭЭГ) — сталкивается с серьезной проблемой классификации и интерпретации сигналов нейронов [-- стр. 22].
Можно использовать сигналы мышечной активности, регистрируемые электромиографическими датчиками. Еще проще — отслеживать объем сокращенной мышцы. Такие сигналы сравнительно просты и могут быть классифицированы не только по типу паттерна, но еще и градуально, в зависимости от силы сокращения мышц. Эта градуальность дает возможность пропорционального управления.
На первый взгляд, все просто: снимай биометрические паттерны человека и преобразуй их по заданному алгоритму в команды управления периферическими устройствами. Но для решения этой задачи логическими методами и координации движения руки в режиме реального времени (с интервалом, скажем, в 1 мс) потребовался бы процессор с тактовой частотой порядка 1 млн ГГц — что вряд ли достижимо даже с привлечением параллельных вычислений. В задаче моторной координации требуется непрерывный обмен данными между потоками: динамикой отдельных мышц, — и распараллелить процессы трудно. Мозг же человека, осуществляющий моторную координацию, использует "тактовую" частоту всего лишь 10 Гц вместо 1 млн ГГц при потреблении "энергии", не превышающей сотни ватт.
Рис. 1 "Нейротранслятор" — бытовые применения
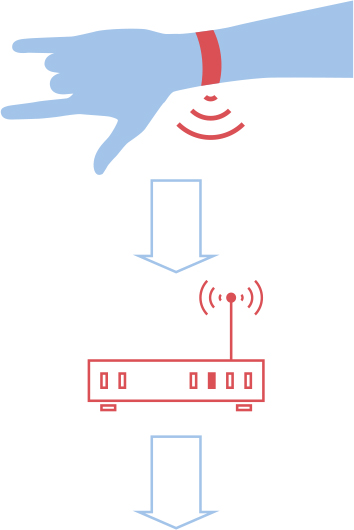
- приготовить кофе
- сделать заказ
- включить свет
- регулировать температуру
Возникают два варианта решения. Первый — попытаться создать нейроморфную искусственную систему, способную реализовать многопараметрическое нейроуправление. Но алгоритмы нейровычислений мозга в целом и нейроуправления в частности до сих пор не известны. Упомянутая огромная разница в вычислительной эффективности "логического компьютерного" и "мозго-нейронного" подходов к решению задачи координации движений свидетельствует, что мозг использует принцип вычислений, отличный от бинарной, нечеткой или каких-либо других логик, используемых в современной информатике.
Второе направление — построение эффективной системы регистрации и декодирования сигналов мозга (СРД) на уровне центральной нервной системы и на уровне ее периферических проекций.
Таким устройством может быть робот-аватар, снабженный, кроме систем копирования кинематики движений человека-оператора, еще и нервно-мышечным и мозговым каналом обмена сигналами — нейроинтерфейсом, позволяющим оператору чувствовать движения робота. Он вовсе не должен быть антропоморфным: это может быть любая промышленная машина. Задача заключается лишь в эффективной проекции ее параметров, калибровке биометрических сигналов человека и организации биологической обратной связи, позволяющей достигнуть адаптивного результата.
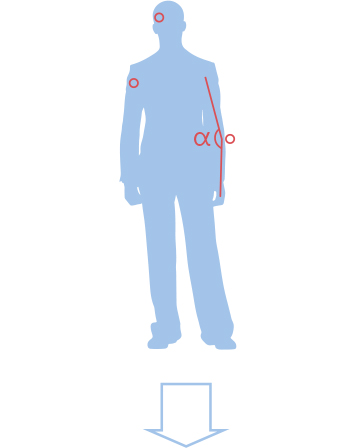
Рис. 2 Схема сенсоров для регистрации биоэлектрических сигналов человека S (s1, s2...)
Интерпретатор сигналов биоуправления команд внешним исполнительным устройством (СРД-1) T:S->Y
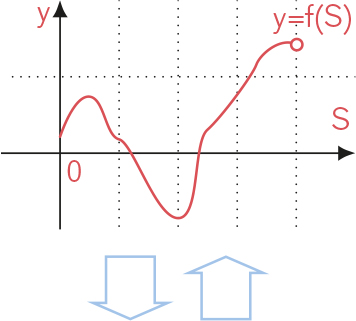
Средства интеграции с исполнительным устройством Y (y1, y2...)

Последние несколько лет работы по созданию нейроинтерфейса управления (комплекс системы регистрации и декодирования, СРД-1) ведутся и в ННГУ им. Н.И. Лобачевского в сотрудничестве с Приволжским федеральным медицинским исследовательским центром и Центром когнитивных исследований ВШЭ. Упрощенная концептуальная схема прототипа устройства такова: биометрические сигналы (мозг — компьютерный интерфейс, сигналы с электромиографических датчиков и датчиков положения конечностей) регистрируются и подаются на вход транслятора СРД-1, осуществляющего декодирование и дальнейшую передачу команды исполнительным устройствам. Система устроена так, что, например, при пропорциональном управлении можно движением руки или напряжением мышц контролировать мощность двигателя, громкость музыки или движение искусственного манипулятора.
Проблем еще много: предстоит увеличить точность регистрации биометрических сигналов, поработать с моделями их декодирования, алгоритмами совмещения и интерпретации сигналов, регистрируемых с различных каналов, алгоритмами выработки команд для исполнительных устройств и настройкой обратной связи (обучением оператора-пилота). Но все эти проблемы теоретически и технически разрешимы.